秦 艳,刘瑞星,康 臻,李宏光,宫经珠,孙宇楠,赵俊成
(西安应用光学研究所,陕西 西安 710065)
高动态范围成像(high dynamic range imaging,HDRI)技术在影像制作、虚拟现实、医学检测等领域都有重要的应用,主要原因是其画面层次比低动态范围图像更丰富,能够很好地保留复杂照明场景中高亮度区和低亮度区的细节信息[1-3],如今已成为国内外研究热点之一,并得到了迅速发展。
国外学者对于高动态范围图像技术在光学领域的研究比较系统,从多方面分析了高动态范围图像作为亮度测量工具的可行性、局限性以及测量结果的准确性[3-5]。例如通过HDRI 摄影获得的亮度分布图,可以根据物体、人物、地面、视觉任务、颜色和亮度进行分析,计算出每个特征贡献的相应照度,并提出了一种测量由特定物体、颜色和特征引起的照度分析方法;
探讨了高动态范围成像用于捕获灯具内单个发光二极管亮度的可能性,该研究结果表明,高动态范围成像技术在捕获单个LED 亮度方面的能力很好[6-7]。国内学者同样对高动态范围图像技术进行了大量系统的研究,多项研究表明了其应用于亮度测量的可行性和优越性,例如从数码相机的成像原理出发,在光度学和色度学原理的基础上设计了一种利用高动态范围图像提取光环境参数的方法;
提出了通过高动态范围亮度分布图像和高动态范围渲染技术对室内照明设计进行分析优化的方法[8-12]。
由于夜间道路环境中不仅包含较高亮度的光源,而且包括较低亮度的路面,亮度范围可达104之广,普通数码相机由于光圈、曝光时间等因素的限制使其所获取的图像亮度测量范围有限,常存在过曝光或欠曝光现象,导致部分亮度信息丢失。目前针对夜间道路照明场景中的极端亮度分布情况的检测鲜有公开的研究成果。基于此,本课题提出一种基于高动态范围成像技术的极端亮度测量方法,主要针对道路两侧路灯出光面的平均亮度进行测量,为评价道路照明光环境提供关键数据支撑,进而为道路环境中光污染防治和保障道路交通安全提供了解决方案。
高动态范围图像是一种比普通图像可以显示更大动态范围的图像。高动态范围图像在场景的最大亮度值和最小亮度值之间提供更多的亮度级,从而可以记录和显示更大的动态范围和更丰富的图像细节。
高动态范围图像一般通过使用浮点值存储图像亮度数据来增加图像存储的数据量,或者通过使用更大的存储数据宽度(例如:16 bit 或者32 bit)来提高图像存储数据的动态范围。例如使用16 bit颜色通道进行存储,通过(1)式计算可得其动态范围D约为48 dB,比使用8 bit 通道存储的图像动态范围增加了1 倍。

式中:D为动态范围;
Imax、Imin分别为图像最大亮度值和最小亮度值。
高动态范围图像常见的存储格式有PFM、Radiance RGBE、FJPEG 等。动态范围可以用来衡量图像的质量,动态范围越大,显示的亮度级别越多,保留的高光区和阴影区的信息越多,包含的场景细节越多。
1) CIE 1931-RGB 表色系统
CIE 在Wright 和Guild 的两项颜色匹配实验基础上建立了CIE 1931-RGB 系统[13],规定了三原色的波长分别为700.0 nm(R)、546.1 nm(G)、435.8 nm(B),并选择使用相等数量的三原色匹配出等能白光的方法来确定三刺激值单位。经过实验和计算,最终确定匹配等能白光的三原色(R、G、B)单位的光亮度比为1.000∶4.590 7∶0.060 1,辐亮度比为72.096∶1.379 1∶1000。
将Wright 和Guild 的实验数据进行转换,转换后的数据一致性较好,取平均值后用来表示人眼的光谱三刺激值,并被命名为“CIE 1931-RGB 系统标准色度观察者光谱三刺激值”。
2) CIE 1931-XYZ 表色系统
为了解决CIE 1931-RGB 系统中光谱三刺激值和色度坐标存在负值的问题,方便理解和使用,对CIE 1931-RGB 系统进行了数学转换。采用假想的三原色XYZ 代替RGB 三原色[14],构建新的色度图,使用匹配等能白光确定三刺激值的单位,并将新系统命名为“CIE 1931 标准色度观察者光谱三刺激值”。在该系统中,XYZ 三原色可以包括所有颜色,并且规定X、Z 两原色只代表色度,不表示亮度,亮度只与Y 有关系。
3) CIE 1931-RGB 表色系统与CIE 1931-XYZ 表色系统的转换
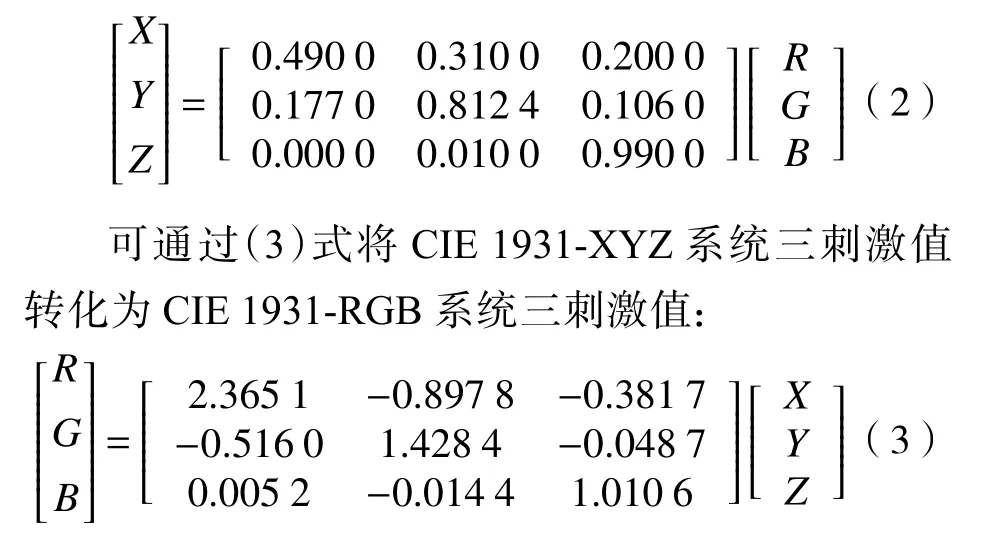
可通过(2)式将CIE 1931-RGB 系统三刺激值转化为CIE 1931-XYZ 系统三刺激值:
4) 高动态范围图像亮度测量
本文选用多曝光法获取高动态范围图像,使用数码相机对待测场景以不同的曝光参数拍摄一系列低动态范围图像,将低动态范围图像合成为高动态范围图像,高动态范围图像的保存格式为Radiance RGBE 格式。
Radiance RGBE 编码是使用整数值对浮点型小数进行编码,每个像素使用4 个8 位通道进行保存,其中前3 个通道分别存储R、G、B 3 个颜色分量的整数值,第4 个通道存储指数值E。通过(4)式可以获得高动态范围图像的浮点形式的灰度值(Rgv、Ggv、Bgv):

式中:Rgv、Ggv、Bgv分别为3 个颜色分量的浮点值;
R、G、B分别为3 个颜色分量的整数值;
E为3 个颜色分量的指数值。
因为高动态范围图像的灰度值(Rgv、Ggv、Bgv)与CIE 1931-RGB 系统中的三刺激值(R、G、B)有所差异,所以需要通过实验获得高动态范围图像的灰度值与R、G、B三刺激值的关系,实现将图像灰度值转换为R、G、B三刺激值,进而可以通过(2)式将CIE 1931-RGB 系统三刺激值转化为CIE 1931-XYZ 系统三刺激值。
由于CIE 1931-XYZ 系统中的Y刺激值函数与人眼的明视觉光谱光视效率函数相同[15-18],为了直观表示颜色亮度,CIE 规定Y刺激值不仅表示待配色中绿原色的数量,还表示待配色色光的亮度,因此Y刺激值与亮度成正比关系,即:

式中:L为实际亮度值;
k为比例系数;
Y为CIE 1931-XYZ 系统的Y刺激值。
数码相机的性能会直接影响亮度测量结果,为了满足课题的测量要求,所选择的相机应符合以下条件:
1) 数码相机相关参数应具有手动调节功能,可以手动改变曝光时间、光圈大小等参数,便于拍摄一系列曝光参数不同的照片,用于合成高动态范围图像。
2) 数码相机可以记录每幅图像拍摄状态和参数,记录拍摄照片的曝光时间、光圈大小等参数,方便后续计算或合成高动态范围图像。
3) 数码相机曝光范围大,即可以测量的亮度范围大,可以获得强光源或夜间道路的图像信息。
4) 数码相机具有高像素,可以清晰地获得远距离或小面积的目标物体图像信息。
5) 数码相机传感器动态范围大。
6) 数码相机续航能力强,可以满足长时间室外测量工作。
综上所述,本文选择尼康 D5300 搭配腾龙18-200VC 镜头作为测量设备,所选用数码相机和镜头的主要性能指标如表1 所示。

表1 相机和镜头的主要性能指标Table 1 Main performance parameters of camera and lens
使用已校准的CS-2000 分光辐射亮度计作为标准器对相机进行标定,如图1 所示。将24 色色卡置于桌面或墙上,使色卡垂直于地面,测试时将三脚架分别放在色卡前方3 m、2 m、1 m 处,调整三脚架高度,分别使相机和CS-2000 分光辐射亮度计中心与色卡中心等高,开启并等待相机稳定。拍摄前对相机部分参数进行设置:感光度ISO100、光圈F5、设置自动白平衡等。拍摄时,使光圈值和焦点不动,以1/3 eV 步长改变曝光时间。

图1 亮度标定实验Fig. 1 Luminance calibration experiment
图2 为三脚架距离色卡3 m、光圈值F=5、曝光时间t=(1/25~8)s 时,相机拍摄的低动态范围图像(由于拍摄图像数量较多,此处只展示部分图像)。

图2 相机拍摄的低动态范围图像Fig. 2 Low dynamic range images by camera
将CS-2000 分光辐射亮度计置于相同位置的三脚架上,使其在距离色卡3 m 处测得色卡上选取的12 个色块的亮度和色度信息,选取色卡上的部分色块,如图3 所示,其测量数据如表2 所示。可以看出亮度值与CIE 1931-XYZ 系统的Y刺激值相等,所以(5)式中的k为1。

图3 参数标定选取的色块Fig. 3 Color blocks selected for parameter calibration

表2 选取色块的亮度和色度信息Table 2 Luminance and chroma information of selected color blocks cd/m2
将拍摄的不同曝光参数的低动态范围图像合成为高动态范围图像,合成时开启像素对齐、去鬼影等功能,提取合成的高动态范围图像中相应色块的灰度值(Rgv、Ggv、Bgv),3 m 处的数据如表3所示。分析CS-2000 分光辐射亮度计获取的色块亮度和色度信息,确定亮度与Y刺激值的比例关系。通过(3)式,将亮度计测得的X、Y、Z三刺激值转换为R、G、B三刺激值,3 m 处的数据如表4所示。

表3 选取色块的灰度值Rgv、Ggv、BgvTable 3 (Rgv, Ggv, Bgv) gray value of selected color blocks
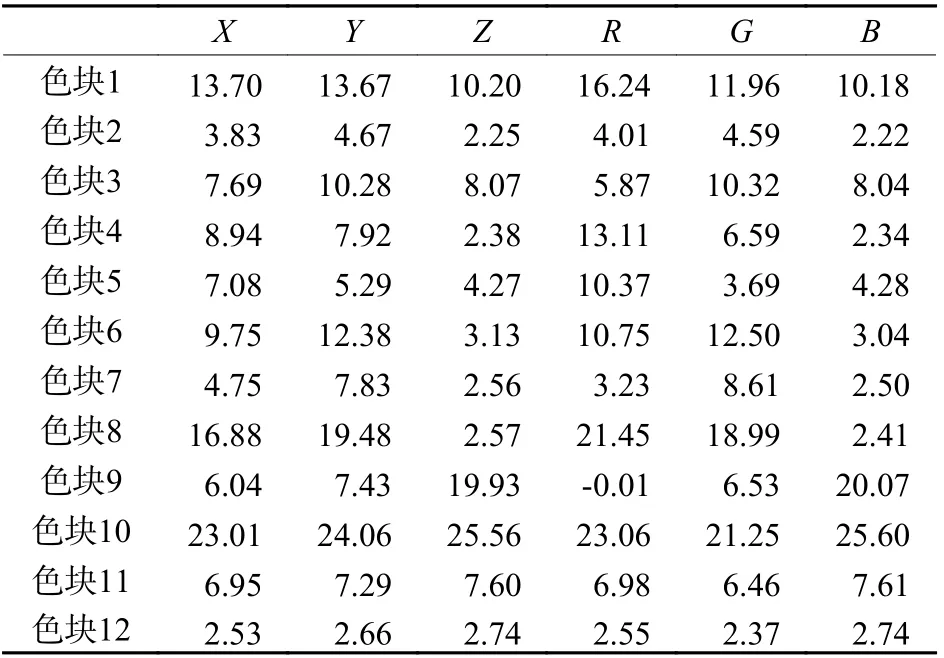
表4 X、Y、Z 转换为R、G、B 的结果Table 4 Results of X, Y, Z converting to R, G, B
对3 m、2 m、1 m 处转换后的R、G、B刺激值与之前获取的高动态范围图像中对应色块的灰度值Rgv、Ggv、Bgv进行拟合,去除异常数据后获得拟合函数关系(6)式,拟合图如图4 所示。


图4 R、G、B 三刺激值与Rgv、Ggv、Bgv 灰度值拟合图Fig. 4 Fitting diagram of R, G, B tristimulus values and Rgv,Ggv, Bgv gray values

R-Rgv、G-Ggv和B-Bgv拟合关系的判定系数R2分别为0.942、0.913 和0.953,显著性检验F分别为254.152、225.627 和253.426,拟合结果比较理想。
高动态范围图像测量系统的测量流程如图5所示。首先依据(4)式将采集到的高动态范围图像(R、G、B)转化为灰度值(Rgv、Ggv、Bgv),其次根据拟合的关系式(6)式将灰度值(Rgv、Ggv、Bgv)转换CIE 1931- RGB 刺激值,然后根据(2)式得到CIE 1931- XYZ 刺激值,最后依据(5)式得到高动态范围图像亮度值。

图5 高动态范围图像测量系统的测量流程Fig. 5 Measurement process of high dynamic range image measurement system
为验证基于高动态范围成像技术的极端亮度测量方法的可靠性和适用性,分别选择陕西省西安市神舟三路与航天中路的交叉路口、以及神州大道辅路作为测试地点,使用标定过的数码相机在测试地点道路环境中拍摄一系列不同曝光参数(F=5,曝光时间1/40 s~8 s)的低动态范围图像,将其合成为高动态范围图像,通过数据处理得到测量环境中的亮度分布,并与CS-2000 分光辐射亮度计测得的值进行对比,测量结果如表5 所示。分析表5 可知,基于高动态范围成像技术的极端亮度测量方法得到的测量值均小于CS-2000 分光辐射亮度计测得的亮度值,2 个测试地点测试结果相对误差分别为-2.2 %和-2.5 %,表明该方法具有较高的可靠性和适用性。

表5 道路环境中高动态范围亮度测试地点结果Table 5 High dynamic range luminance test location resultsin road environment
本文提出了一种基于高动态范围成像技术的极端亮度测量方法,利用标定的数码相机作为测量设备,通过数字图像处理技术将测量结果合成高动态范围图像,并提取亮度信息。通过在道路环境中实地测量,验证了基于高动态范围成像技术测量极端亮度的测量范围可达104,满足道路环境照明质量的评价需求。同时分析测量数据发现,该测量方法得到的测量值均小于CS-2000 分光辐射亮度计测得的亮度值,2 个测试地点测试结果与CS-2000 分光辐射亮度计测得亮度值的相对误差分别为-2.2 %和-2.5 %,表明基于高动态范围成像技术的极端亮度测量方法具有较高的可靠性和适用性。
随着高杆照明、护栏照明以及各类交通补光灯的广泛应用,该方法可以提高道路环境照明质量的检测精度与检测效率,为道路照明质量的提升提供计量保障,具有广泛的使用价值。
猜你喜欢色卡数码相机亮度这个“数码相机”不一般,全球最大科学大众(2020年23期)2021-01-18数字色卡动漫界·幼教365(中班)(2020年12期)2020-12-21颜色读数与物质浓度模型的新思考洛阳师范学院学报(2020年11期)2020-12-11亮度调色多面手摄影之友(影像视觉)(2019年3期)2019-03-302018/19秋冬国际流行色定案色卡分析流行色(2018年5期)2018-08-27为什么数码相机不用胶卷也能照相小学阅读指南·低年级版(2017年12期)2017-12-26亮度一样吗?小天使·六年级语数英综合(2017年5期)2017-05-27基于斩波调制的LED亮度控制现代工业经济和信息化(2016年19期)2016-05-17人生的亮度公民与法治(2016年23期)2016-05-172016年情人节色卡Coco薇(2016年2期)2016-03-22




